Il s’agit d’une méthode de câblage des moteurs d’aiguilles qui permet de réaliser des pupitres de commande se rapprochant d’un modèle “géographique”.
Rappelons qu’à la SNCF on appelle “postes géographiques” les postes d’aiguillage où les aiguilles sont commandées par itinéraires, en appuyant sur des boutons correspondant aux extrémités de ceux-ci, c’est-à-dire à l’endroit d’où l’on vient et à l’endroit où l’on veut aller.
Pour plus de détails sur la réalisation de postes de commandes géographiques en modèle réduit, voir notre page sur la réalisation des postes d’aiguillage ainsi que celle justifiant l’emploi d’un micro-ordinateur pour faire ce genre de chose.
Sommaire
Voici un exemple pris sur le réseau HO de notre Association.
Il s’agit du pupitre de commande d’une zone de remisage pour des rames prêtes à être envoyées en ligne.
(Précisons que ces rames sont destinées aux visiteurs impatients, car lorsque nous sommes entre nous, nous mettons un point d’honneur à composer les rames avant envoi en ligne, comme dans la réalité, avec mise en tête de la machine, etc).
Cette zone comporte un tiroir (voie 1) et quatre voies de remisage (voies 2 à 5).
Les trains entrent et sortent par la voie située en bas à droite.
Avec une commande traditionnelle des aiguilles, on aurait deux boutons par aiguille.
Pour envoyer un train sur la voie 4, par exemple, il faudrait appuyer successivement sur trois boutons :
- aiguille 1 à droite
- aiguille 2 à droite
- aiguille 4 à gauche.

En utilisant une “matrice de diodes”, on n’a plus besoin que d’un bouton par voie.
Pour envoyer un train sur la voie 4, comme précédemment, il suffit d’appuyer simplement sur le bouton correspondant à cette voie.

Cas des moteurs d’aiguilles à solénoïdes (Jouef, Peco, etc)
Pour pouvoir utiliser des diodes, il faut alimenter les bobines avec une tension de polarité fixe. Il n’est ni nécessaire ni souhaitable d’utiliser du continu bien pur et bien lissé: de l’alternatif redressé double alternance suffit.
Pour obtenir une tension redressée, on monte un pont redresseur derrière la sortie accessoire d’un transformateur pour trains. Noter qu’il n’y a PAS de condensateur dans ce montage.
Les boutons sont numérotés comme sur le diagramme du pupitre: V1 pour le bouton d’accès à la voie 1, V2 pour la voie 2, etc..
Les bobines des moteurs d’aiguille sont numérotées de même: par exemple 3G est la bobine qui met l’aiguille 3 en position à gauche.
Chaque bouton commande les bobines appropriées par l’intermédiaire de diodes, pour éviter les retours.

Pourquoi une “matrice” de diodes ?
Le terme “matrice” est emprunté aux mathématiques, où il désigne un tableau de chiffres de forme rectangulaire.
Dans le cas présent, les chiffres sont remplacés par des valeurs binaires (“oui” ou “non”), représentées par des “X” dans le tableau ci-contre.
Ces X indiquent quelles bobines de moteur d’aiguille doivent être actionnées par chaque contact.
Par exemple: le contact V3 doit actionner les bobines 1D, 2G, et 3D.
| 1G | 1D | 2G | 2D | 3G | 3D | 4G | 4D | |
Cette matrice exprime de façon logique la position des diodes sur le schéma précédent.
Elle doit être établie avant de faire le schéma, mais il nous a semblé plus clair de présenter ici le schéma en premier.
Dimensionnement des composants
Dans tous les cas, les diodes peuvent être des 1N4007, la bête à tout faire du modéliste.
Les boutons seront ce que l’on peut s’offrir. A l’Association, nous employons des boutons de basse qualité, mais peu coûteux (1,50F), compte tenu que le modèle juste au dessus coûte cinq à dix fois plus cher.
Le pont redresseur doit être dimensionné en fonction du nombre maximum de bobines susceptibles d’être commandées simultanément: ici, 3. Un pont 2 à 3A convient généralement.
Le transformateur doit lui aussi être capable de fournir :
- le courant nécessaire à la commande simultanée de ces bobines
- et la tension suffisante, car, comme le pont redresseur fait perdre environ 1,4V, et les diodes 0,7V, on a une perte finale de tension d’environ 2,1V.
Ce sont là les seules limitations du système.
En pratique, seules les aiguilles Peco ancienne génération posent un réel problème: avec un courant de commande de plusieurs ampères par bobine, il n’est pas possible d’en commander simultanément plus de “quelques unes”, dans de bonne conditions de fiabilité et de sécurité électrique.
Avec des moteurs du genre Jouef, Arnold, Fleishmann, etc, il n’y a pas de problème.
Nous n’avons pas fait l’expérience avec les moteurs Peco dits “à faible consommation” (PL-10 W).
Cas des moteurs d’aiguilles rotatifs (Tortoise, Fulgurex, Lemaco, Switchmaster, etc)
Avec des moteurs rotatifs, la réalisation est un peu plus compliquée, car il faut utiliser des relais auxiliaires.
C’est ce que nous avons fait sur notre réseau, où nous avons des moteurs Tortoise, et voici ce que ça donne…
Rappel de principe :
Les moteurs rotatifs se caractérisent par le fait qu’il faut inverser la tension aux bornes pour mettre l’aiguille dans une position ou dans l’autre.
Pour cela on peut utiliser une alimentation double, ou, plus simplement, l’une ou l’autre alternance d’une tension alternative.
C’est cette méthode (qui est décrite dans les modes d’emploi des moteurs) que nous avons adoptée.
Le schéma ci-contre montre comment commander quatre moteurs M1, M2, M3, M4 par quatre inverseurs “un circuit deux positions” A1, A2, A3 et A4.

Notre réalisation :
Pour commander la tension aux bornes de nos moteurs, nous aurions pu utiliser tout simplement des relais auxiliaires bistables (Fleishmann ou autre). Dans ce cas, le schéma de commande de ces relais serait strictement identique au schéma 1 (voir plus haut), et le schéma de commande des moteurs à partir de ces relais serait identique au schéma 2 (ci-dessus).
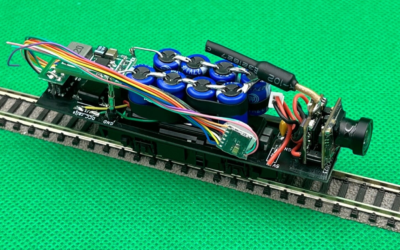
Cependant, vu le coût de ces relais bistables, nous avons préféré utiliser des relais classiques de récupération. L’ensemble se présente alors comme ceci :
En haut, les 4 Tortoise à commander: M1, M2, M3 et M4 (numéros en correspondance avec le diagramme des voies).
A gauche, les arrivées des alimentations: du 12V alternatif pour les Tortoises, et du 48V continu pour les relais auxiliaires.
En bas à gauche, les boutons poussoirs de commande correspondant aux voies: V1 à V5.
Le cadre central correspond au petit circuit imprimé que nous avons réalisé pour l’occasion.

Les relais auxiliaires (A1 à A4) n’ont que 2 contacts inverseurs :
Le premier contact (en haut, numéroté A1-1 pour le relais A1) sert à alimenter le Tortoise correspondant sur une alternance ou l’autre du 12V CA, par le biais des diodes D1 et D2.
En haut, les 4 Tortoise à commander: M1, M2, M3 et M4 (numéros en correspondance avec le diagramme des voies).
A gauche, les arrivées des alimentations: du 12V alternatif pour les Tortoises, et du 48V continu pour les relais auxiliaires.
En bas à gauche, les boutons poussoirs de commande correspondant aux voies: V1 à V5.
Le cadre central correspond au petit circuit imprimé que nous avons réalisé pour l’occasion.
Les relais auxiliaires (A1 à A4) n’ont que 2 contacts inverseurs:
Le premier contact (en haut, numéroté A1-1 pour le relais A1) sert à alimenter le Tortoise correspondant sur une alternance ou l’autre du 12V CA, par le biais des diodes D1 et D2.
Note : pour la mise au point et le dépannage, nous avons inséré, sur le circuit imprimé, une LED en série avec chaque relais. Avec des relais de tension plus réduite, cette astuce ne pourrait pas être utilisée, la LED ne supportant plus le courant du relais, et le relais ne supportant plus la chute de tension de la LED.
Dimensionnement de la résistance :
La résistance en série avec chaque relais doit avoir une valeur de l’ordre de 10% de celle du relais. De cette façon, le relais fonctionne sous 90% de sa tension nominale, ce qui, d’après notre expérience, ne pose aucun problème.
À la retombée, la résistance absorbe une puissance important (4 W dans notre cas). Il faudrait, en principe, utiliser des résistances de puissance appropriée. Mais compte tenu que le court-circuit ne dure que le temps d’appuyer sur le bouton, nous nous sommes contentés de résistances de 1 ou 2 W.
Cette matrice exprime de façon logique la position des diodes sur le schéma précédent.
Elle doit être établie avant de faire le schéma, mais il nous a semblé plus clair de présenter ici le schéma en premier.
Traitement de plans de voie plus complexes
Comme on vient de le voir, dans le cas de plans de voie simples, la commande des aiguilles par matrice de diodes est très facile à mettre en oeuvre, surtout dans le cas de moteurs d’aiguille à bobines.
On est amené à se demander s’il est possible de gérer de la même façon, c’est-à-dire avec seulement des
boutons poussoirs à 1 contact et des diodes, des plans de voies plus complexes, et notamment des zones à plusieurs entrées et sorties.
Dans le cas de moteurs à solénoïdes, c’est possible, mais il est parfois nécessaire que les deux bobines de chaque moteur soient complétement séparées. Nous présentons ci-dessous un exemple destiné à montrer la méthode à suivre pour concevoir le schéma de l’ensemble.
Dans le cas de moteurs rotatifs, il faut prévoir des relais auxiliaires, comme plus haut, mais leur schéma de commande est plus compliqué. Des solutions sont évoquées sur notre page consacrée à la réalisation de postes d’aiguillage.
Exemple avec des moteurs à solénoïdes :
Prenons à titre d’exemple le gril de voie ci-contre.
V1 à V6 désignent à la fois les voies et les boutons de commande.
Les aiguilles sont numérotées A1 à A6, et leurs moteurs A1D, A1G, etc.

Pour pouvoir aller, par exemple, de la voie 1 à la voie 5, on appuie simultanément sur les boutons V1 et V5.
Cette opération doit commander les moteurs d’aiguille A1D, A4D, et A6G.
Le problème peut être résolu en utilisant cette fois-ci deux ensembles de diodes, un pour chaque coté du gril de voies :
Le premier ensemble, à partir des boutons V1 et V2, va appliquer une tension (par exemple +14V) sur un coté des bobines susceptibles d’être commandées lorsqu’on vient de la voie V1 ou de la voie V2.
Le second ensemble, à partir des boutons V3, V4, V5 et V6, va appliquer la tension complémentaire (-14V) sur l’autre coté des bobines susceptibles d’être commandées lorsque l’on va sur la voie V3, ou V4, ou V5, ou V6.
Par exemple :
- si l’on appuie sur le bouton V1, on met sous tension une extrémité des bobines 1G, 1D, 3D, 4D, 5G, 5D, 6G et 6D
- si l’on appuie sur le bouton V3, on met sous tension l’autre extrémité des bobines 1G, 2G, 3G, 3D et 5G
- si l’on appuie simultanément sur ces deux boutons, seules les bobines ayant leurs deux extrémités sous tensions seront actionnées, soit: 1G, 3D et 5G. Comme on peut le vérifier sur le diagramme précédent, ceci correspond bien à l’itinéraire V1-V3.
| X | ||||||||||||
Et voici le schéma de principe de la réalisation.
On a représenté les bobines des aiguilles comme si elles étaient toutes électriquement séparées.
On a représenté toutes les diodes (36) correspondant à la matrice théorique précédente.

Ce schéma peut être simplifié, d’une part pour économiser des diodes, et d’autre part pour tenir compte du fait que la plupart des moteurs d’aiguille ont leurs deux bobine connectées ensemble à une extrémité.
Cette simplification est à étudier au cas-par-cas, en prenant soin d’éviter les “retours”.
Il y a en général plusieurs solutions possibles.
Sur ce schéma simplifié, il n’y a plus que 22 diodes au lieu de 36.
La simplification a été menée de façon à conserver un point commun entre les deux bobines de chaque moteur.
Avec des moteurs à bobines séparées, on aurait pu économiser 4 diodes de plus.

Certains plans de voie exigent que les bobines de certains moteurs soient électriquement séparés (comme chez Peco).
Bien entendu, les limitations liées au courant maximum consommé par les moteurs demeurent. Dans cet exemple, les moteurs sont commandés par trois à la fois.
De plus, comme on a dans le circuit une diode de plus que précédemment, la chute de tension parasite est portée à 2,4 V.
Il serait d”ailleurs possible de réduire encore le nombre des diodes par des montages en série, mais, compte tenu de cette chute de tension et du prix très faible des diodes, le jeu n’en vaut pas la chandelle.
Autres solutions
Pour mémoire, citons aussi d’autres solutions, extrémement simples, comme le “crayon électrique” des anglo-saxons, ou extrémement sophistiquées, comme la commande par micro-ordinateur… De quoi produire encore pas mal de pages Web!

0 commentaires